Pri niektorých stochastických procesoch je rozumné predpokladať nie náhly ale skôr pozvoľný prechod medzi režimami. Ak sa v TAR modeli nahradí indikačná funkcia \(I\) prechodovou funkciou \(G\) (transition function), ktorá je spojitá (ideálne aj hladká, teda so spojitými deriváciami) a ohraničená hodnotami 0 a 1, vznikne tzv. STAR model (Smooth Transition Autoregressive) \[
X_t = \phi_1'Y_{t,1} [1-G(Z_t; c, \gamma)] + \phi_2'Y_{t,2} G(Z_t; c, \gamma) + \varepsilon_t
\tag{9.1}\] kde rovnako \(Z_t\) je prahová premenná, \(\phi_j\) vektor autoregresných parametrov a \(Y_{t,j}\) vektor bázových funkcií autoregresného modelu v \(j\)-tom režime, \(c\) prahová hodnota, ale navyše je tu parameter vyhladzovania \(\gamma\), ktorý určuje rýchlosť prechodu z jedného režimu do druhého.
9.1 Prechodové funkcie
Príkladom prechodovej funkcie je \(G(Z_t; c, \gamma)=H[\gamma(Z_t-c)]\), kde \(H(\cdot)\) je distribučná funkcia normovaného normálneho rozdelenia N(0,1). Podobná, no oveľa jednoduchšia a používanejšia je logistická prechodová funkcia \[
G(Z_t; c, \gamma) = \frac{1}{1+e^{-\gamma(Z_t-c)}}\ , \qquad \gamma>0,
\] potom model (9.1) sa označuje ako LSTAR (Logistic Smooth Transition Autoregressive). Inou používanou prechodovou funkciou je exponenciálna \[
G(Z_t; c, \gamma) = 1 - e^{-\gamma(Z_t-c)^2}\ , \qquad \gamma>0,
\] ktorá vedie ku modelu ESTAR (Exponential STAR), obe ilustruje Obr. 9.1 pre \(c=0\) a rôzne hodnoty \(\gamma\).
Ako je vidieť, s \(\gamma\to0\) obe funkcie prechádzajú medzi hodnotami 0 a 1 veľmi hladko a pomaly, oba STAR modely sa tak blížia ku jednorežimovému AR modelu. Pri \(\gamma\to\infty\), logistická prechodová funkcia sa blíži ku \(I(Z_t>c)\) a LSTAR sa stáva TAR modelom, zatiaľčo exponenciálna sa blíži ku \(I(Z_t\neq c)\), čo už samozrejme nevedie ku TAR. Z viac-parametrických sa používa napr. logistická funkcia 2-stupňa \[
G(Z_t; c, \gamma) = \frac{1}{1+e^{-\gamma(Z_t-c_1)(Z_t-c_2)}}\ , \qquad \gamma>0,
\] zobrazená s parametrami \(c_1=-1\) a \(c_2=1\) na Obr. 9.1 vpravo.
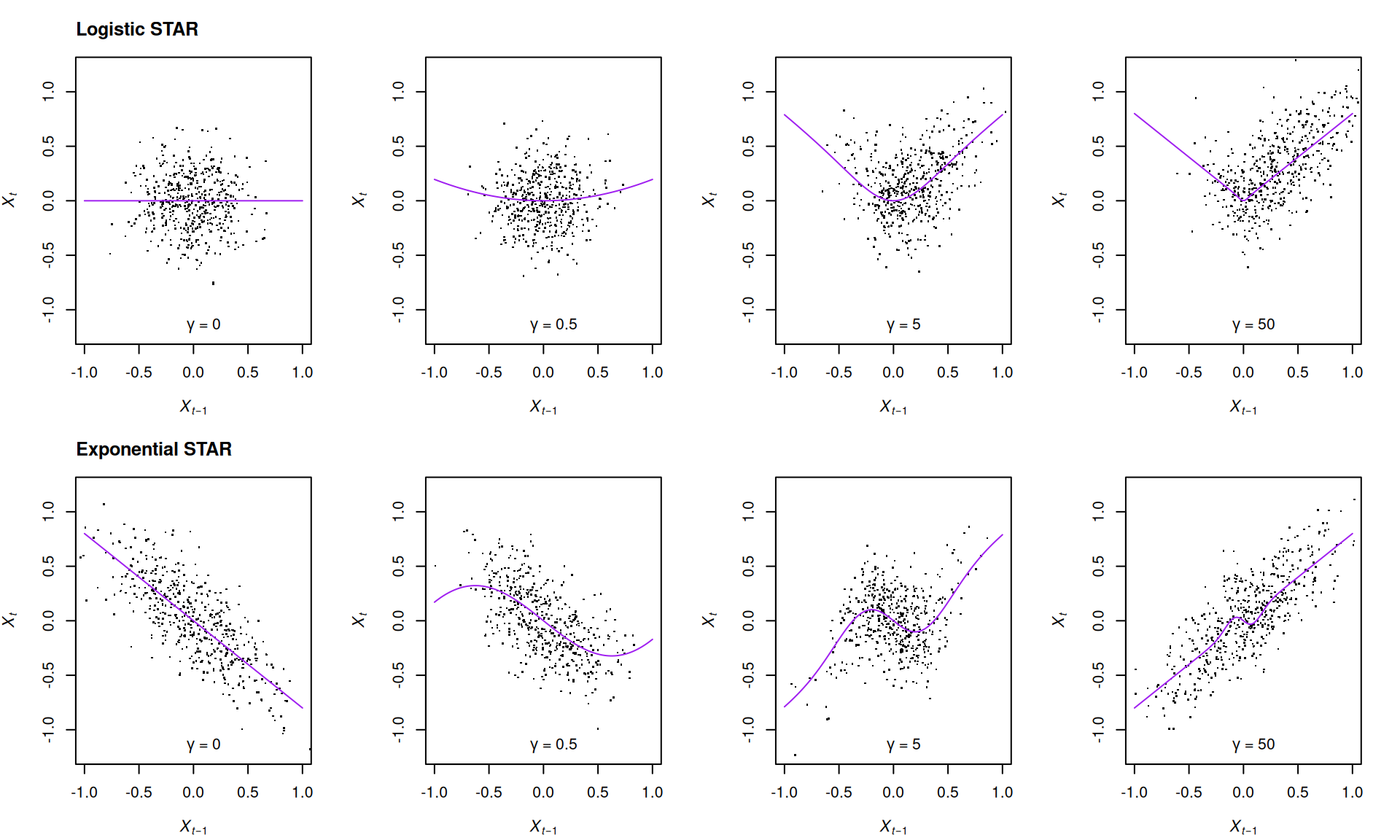
Vplyv vyhladenia na model s premenlivými režimami ilustruje príklad procesu \(X_t=-0.8 X_{t-1}[1-G(X_{t-1};0,\gamma)] + 0.8 X_{t-1}G(X_{t-1};0,\gamma)\) na Obr. 9.2 pre rôzne hodnoty \(\gamma\).
Kód
#' -------- Functions ---------#'#' transition functionTransFun <-function(x, c, gamma, trans=c("LSTAR","ESTAR")) {switch(trans[1],LSTAR = {1/(1+exp(-gamma*(x-c)))},ESTAR = {1-exp(-gamma*(x-c)^2)} )} #' basis function vector for single regimeYt <-function(x, t, p) c(1, x[(t-1):(t-p)])#' basis function vector for 2 regimes (row of X)Xt <-function(x, t, p, d, c, gamma, z=x, trans=c("LSTAR","ESTAR")) { # z is thresshold variable, implemented for MC prediction I <-TransFun(z[t-d], c, gamma, trans) Y <-Yt(x, t, p)c( (1-I)*Y, I*Y )}#' skeletonDetermSTAR <-function(x, t, p, d, c, gamma, par, z=x, trans=c("LSTAR","ESTAR")) {c(par %*%Xt(x, t, p, d, c, gamma, z, trans[1])) } #DetermSTAR(tdat$xT, t=3, p=2, d=1, c=-3, gamma=1, par=c(1,1,1,1,1,1), trans="LSTAR")StochSTAR <-function(x, t, p, d, c, gamma, par, var, trans=c("LSTAR","ESTAR")) {DetermSTAR(x, t, p, d, c, gamma, par, trans=trans[1]) +rnorm(1, 0, sqrt(var))}sim_deterSTAR <-function(n, p, d, c, gamma, par, init, trans=c("LSTAR","ESTAR")) { y <- initfor(t in (p+1):n) { y[t] <-DetermSTAR(y, t=t, p=p, d=d, c=c, gamma=gamma, par=par, trans=trans) }return(y)}sim_stochSTAR <-function(n, p, d, c, gamma, par, var, trans=c("LSTAR","ESTAR")) { y <-rnorm(p,0,sqrt(var))for(t in (p+1):n) { y[t] <-StochSTAR(y, t=t, p=p, d=d, c=c, gamma=gamma, par=par, var=var, trans=trans) }return(y)}
Obrázok 9.2: Skeleton a simulácie STAR modelu s parametrami \(\phi_1=(0,-0.8)\), \(\phi_2=(0,0.8)\), \(c=0\) a \(Z_t=X_{t-1}\) pre \(\gamma=0,0.5,5,50\).
9.2 Skeleton a ekvilibrium
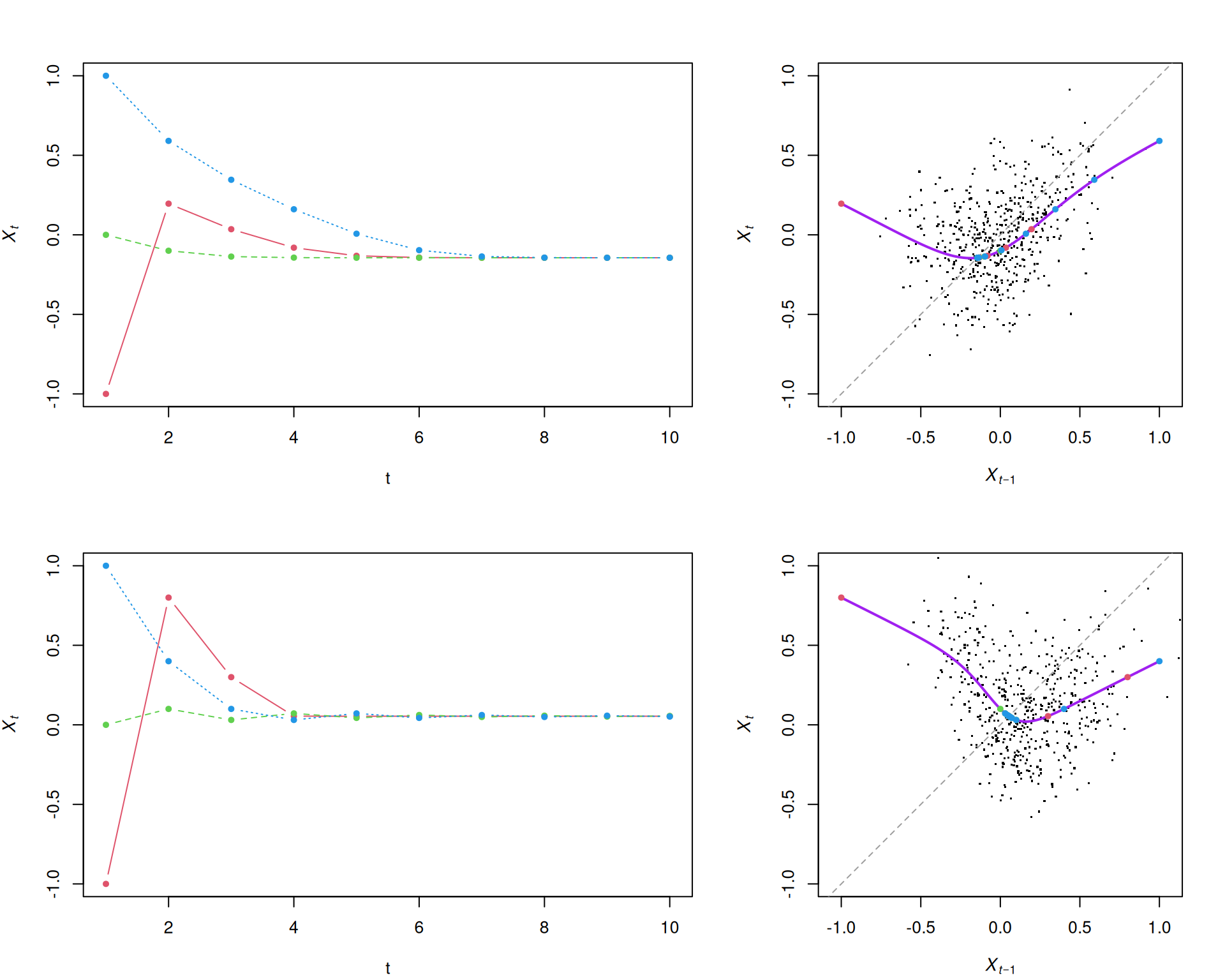
Modely s hladkým prechodom medzi režimami môžu mať rovnako ako SETAR modely žiadne, jedno alebo viac ekvilibrií (či už stabilné alebo nestabilné), ich výpočet je však zložitejší, preto sa spravidla detekuje iba simuláciou. Napríklad na Obr. 9.3 sú zobrazené simulácie LSTAR modelu s rovnakými parametrami ako SETAR z príkladu na Obr. 8.1 b), a navyše \(\gamma=5\). Vidno, že dve stabilné ekvilibriá sa zredukovali do jedného. Podobne vidíme že limit cycle modelu d) vyhladením prechodu konverguje ku jedinému stabilnému ekvilibriu.
Obrázok 9.3: Deterministická simulácia vľavo (pri rôznych počiatočných podmienkach \(X_1\)) procesu STAR(\(p=d=1\)) s parametrami \(c=0\), \(\gamma=5\), \(\varphi_{1,1}=\varphi_{2,1}=-0.5\) a (hore) \(\varphi_{1,0}=-0.3\), \(\varphi_{2,0}=0.1\) resp. (dole) \(\varphi_{1,0}=0.3\), \(\varphi_{2,0}=-0.1\). Napravo je graf skeletonu (fialová, plná čiara) a stoch. simulácie (čiernobiele body).
9.3 Viac režimov
Ak vo vzťahu (9.1) pripustíme, že niektoré autoregresné koeficienty sú nulové (konkrétne \(\phi_{j,i}=0\) pre všetky \(i=p_j+1,\ldots,p_k\) také, že \(p_j<p_k\)) takže \(\phi_1\) a \(\phi_2\) majú rovnaký rozmer, potom \(p_1=p_2=p\) a \(Y_{t,1}=Y_{t,2}=Y_{t}\), a STAR model možno prepísať do tvaru \[
X_t = \phi_1'Y_{t} + (\phi_2-\phi_1)'Y_{t} G(Z_t; c, \gamma) + \varepsilon_t
\] z ktorého jednoduchým rozšírením o ďalšie členy dostaneme \(m\)-režimový STAR model1\[
X_t = \phi_1'Y_{t} + (\phi_2-\phi_1)'Y_{t} G_1(Z_t; c_1, \gamma_1) + \ldots + (\phi_m-\phi_{m-1})'Y_{t} G_{m-1}(Z_t; c_{m-1}, \gamma_{m-1}) + \varepsilon_t
\] s parametrami prechodovej funkcie \(c_1<\ldots<c_{m-1}\) a \(\gamma_1,\ldots,\gamma_{m-1}\).
9.4 Testovanie linearity
Na teste linearity oproti STAR nelinearite sa dá ilustrovať problém nadbytočných parametrov (alebo neidentifikovaných; teda takých, ktoré sa nevyskytujú v oboch testovaných hypotézach) trochu inak, pretože kolaps do AR modelu sa dá okrem obmedzenia \(H_0\colon\phi_1=\phi_2\) vyjadriť aj vo forme \(H_0'\colon\gamma=0\), kedy logistická funkcia je konštatná s hodnotou 0.5 a autoregersné parametre výsledného AR modelu sú rovné \((\phi_1+\phi_2)/2\). Pri prvej formuláci (\(H_0\)), sú neidentifikované parametre \(c\) a \(\gamma\), pri druhej (\(H_0'\)) sú neidentifikované \(c\), \(\phi_1\) a \(\phi_2\) (za platnosti \(H_0'\) môžu posledné nadobúdať akékoľvek hodnoty, ak ich priemer zostane rovnaký). Na rozdiel od SETAR, prístup zvolený na riešenie problému s neidentifikovanými parametrami pri STAR môže použiť LM štatistiku, ktorá má štandardné rozdelenie a model v \(H_1\) netreba vopred odhadovať.
Uvažujme najskôr LSTAR, ktorý prepíšeme do tvaru \[
X_t = \frac12(\phi_1+\phi_2)'Y_{t} + (\phi_2-\phi_1)'Y_{t} G^*(Z_t; c, \gamma) + \varepsilon_t
\tag{9.2}\] kde funkcia \(G^*(\cdot)=G(\cdot)-\frac12\) pri nulovej hypotéze nadobúda nulovú hodnotu. V (Luukkonen, Saikkonen, a Teräsvirta 1988) ju navrhli aproximovať Taylorovým rozvojom prvého stupňa v bode \(\gamma=0\) (t.j. MacLaurinovým rozvojom prvého stupňa), takže \(G^*(Z_t;c,\gamma)\approx G^*(Z_t;c,0)+\gamma\frac{\partial G^*(Z_t;c,\gamma)}{\partial\gamma}\Big|_{\gamma=0}=\frac14\gamma(Z_t-c)\). Po dosadení aproximácie do vzťahu pre model a úprave (pričom sa obmedzíme na endogénnu prahovú premennú a \(d\leq p\)) dostávame pomocný regresný model \[
X_t = \beta_{0,0} + \beta_0'\tilde Y_t + \beta_1'\tilde Y_t Z_t + \eta_t
\] kde \(\tilde Y_t=(X_{t-1},\ldots,X_{t-p})'\) a \(\beta_j=(\beta_{j,1},\ldots,\beta_{j,p})'\), \(j=0,1\). Rozpísaním koeficientiov by bolo zjavné, že \(H_0'\colon\gamma=0\) znamená \(H_0''\colon\beta_{1,i}=0\) súhrnne pre \(i=1,\ldots,p\). Takýto test (tzv. typu LM) sa dá uskutočniť dvojstupňovou regresiou, ako si ukážeme neskôr v testovacej procedúre.
Ako bolo ukázané v (Luukkonen, Saikkonen, a Teräsvirta 1988), test stráca svoju silu v prípadoch, kedy sa režimy líšia iba v absolútnych členoch (\(\varphi_{1,0}\neq\varphi_{2,0}\) ale \(\varphi_{1,i}=\varphi_{2,i}\) pre \(i=1,\ldots,p\)), pretože \(\beta_1\) nezávisí od \(\varphi_{1,0},\varphi_{2,0}\), preto je potrebné aproximovať \(G^*\) rozvojom tretieho stupňa. Výsledkom je pomocná regresia \[
X_t = \beta_{0,0} + \beta_0'\tilde Y_t + \beta_1'\tilde Y_t Z_t + \beta_2'\tilde Y_t Z_t^2 + \beta_3'\tilde Y_t Z_t^3 + \eta_t
\tag{9.3}\] kde koeficienty \(\beta_{0,0}\) a \(\beta_j\), \(j=1,2,3\) sú opäť funkciami parametrov \(\phi_1,\phi_2,c,\gamma\) a analýzou ich vzťahov by sme dostali, že \(H_0'\colon\gamma=0\) zodpovedá hypotéze \(H_0^L\colon\beta_1=\beta_2=\beta_3=0\) a podobným postupom vypočítaná testovacia štatistika (typu LM) má asymptoticky \(\chi^2\) rozdelenie pravdepodobnosti s \(3p\) stupňami voľnosti.
V prípade ESTAR aproximácia \(G^*\) MacLaurinovým rozvojom prvého stupňa v (9.2) vedie k pomocnej regresii \[
X_t = \beta_{0,0} + \beta_0'\tilde Y_t + \beta_1'\tilde Y_t Z_t + \beta_3'\tilde Y_t Z_t^2 + \eta_t
\tag{9.4}\] pri ktorej \(H_0'\) zodpovedá hypotéze \(H_0^E\colon\beta_1=\beta_2=0\) a testovacia štatistika má asymptoticky \(\chi^2(2p)\) rozdelenie pravdepodobnosti.
Praktický postup pri testovaní hypotézy linearity oproti nelienarite typu STAR obsahuje nasledujúce kroky:
Na základe platnosti nulovej hypotézy sa odhadnú rezíduá \(\varepsilon_t\) regresného modelu, v ktorom na ľavej strane je \(X_t\) a na pravej \(Y_t=(1,X_{t-1},\ldots,X_{t-p})\), a vypočíta sa reziduálny súčet štvorcov \(SSR_0=\sum_{t=p}^n\hat\varepsilon_t^2\).
Z regresného modelu, v ktorom na ľavej strane strane figurujú rezíduá \(\hat\varepsilon_t\) z lineárneho modelu a na pravej strane \(Y_t\) a \(\tilde Y_t\ Z_t^j\) (kde \(j=1,2,3\) pri LSTAR a \(j=1,2\) pri ESTAR), sa odhadnú rezíduá \(\eta_t\) a vypočíta \(SSR_1=\sum_{t=p}^n\hat\eta_t^2\). Potom \(R^2=1-\frac{SSR_1}{SSR_0}\).
Testovacia štatistika \(LM=nR^2\) má za predpokladu platnosti nulovej hypotézy asymptoticky \(\chi^2(3p)\) pri LSTAR, a \(\chi^2(2p)\) rozdelenie pri ESTAR.
Pre malé výbery sa odporúča \(F\)-verzia testu so štatistikou \[
LM^F=\frac{R^2/\nu_1}{(1-R^2)\nu_2}=\frac{(SSR_0-SSR_1)/\nu_1}{SSR_1/\nu_2}
\] ktorej rozdelenie sa za predpokladu platnosti \(H_0\) dá aproximovať rozdelením \(F(\nu_1,\nu_2)\), pričom stupne voľnosti pri LSTAR modeli sú \(\nu_1=3p\), \(\nu_2=n-4p-1\) a pri ESTAR analogicky \(\nu_1=2p\), \(\nu_2=n-3p-1\).
Test linearity možno použiť aj na identifikáciu vhodnej prahovej premennej (resp. parametra \(d\)), a to vykonaním pre viacero vhodných kandidátov z triedy STAR a minimalizáciou \(p\)-hodnoty.
Ak sa testami linearity vyberú ako najlepšie modely LSTAR aj ESTAR s rovnakým \(p\) a \(d\), môžeme využiť rozdielnosť v aproximácii prechodových funkcií a jednoducho otestovať \(H_0\colon\beta_3=0\) (vhodný je ESTAR) oproti \(H_1\colon\beta_3\neq0\) (vhodný je LSTAR) pomocou reziduálnej sumy štvorcov \(SSR_L\) z (9.3) a \(SSR_E\) z (9.4) a testovacej štatistiky \(LM=n\frac{SSR_E-SSR_L}{SSR_E}\) ktorá má asymptoticky \(\chi^2(p)\) rozdelenie.
Korektnejší test linearity voči ESTAR nelinearite a z neho vychádzajúca procedúra na rozhodnutie medzi exponenciálnou a logistickou regresiou boli popísané v (Escribano a Jordá 2001), kde upozornili na to, že aproximácia rozvojom prvého stupňa nestačí na vystihnutie krivosti exponenciálnej prechodovej funkcie, vhodnejší je rozvoj duhého stupňa, ktorý do pomocnej regresie (9.4) pridá členy \(\tilde Y_t\ Z_t^3\) a \(\tilde Y_t\ Z_t^4\). V takom regresnom modeli LSTAR vedie na \(\beta_2=\beta_4=0\) a ESTAR na \(\beta_1=\beta_3=0\).
Ako je však poznamenané v (Dijk, Teräsvirta, a Franses 2002), výber medzi prechodovými funkciami je možné odložiť do fázy diagnostiky odhadnutých STAR modelov, kde sa ukáže, ktorý lepšie vystihol nelinearitu v časovom rade.
9.5 Odhad parametrov
Po výbere prahovej premennej a prechodovej funkcie ďalši krok modelovacieho cyklu predstavuje odhad parametrov \(\theta=(\phi_1',\phi_2', \gamma, c)'\) STAR modelu. V zásade je to problém priamočiarej aplikácie nelineárnej metódy najmenších štvorcov \[
\hat\theta=\mathop{\operatorname{argmin}}_\theta\sum_{t=1}^n(x_t-F(\Omega_{t-1};\theta))^2
\] (ktorá je pri normalite rezíduí ekvivalentom metódy maximálnej vierohodnosti, ML, inak sa interpretuje ako kvázi ML) a môže byť vykonaná ľubovoľnou konvenčnou nelineárnou optimalizačnou procedúrou. Tej sa dá uľahčiť redukciou dimenzionality priestoru parametrov uvážením faktu, že autoregresné parametre sa dajú odhadnúť lineárnou metódou najmenších štvorcov podobne ako pri SETAR modeli - podmienene na \(c\) a navyše aj na \(\gamma\), teda \[
\hat{\phi}(c,\gamma)=\left(\sum_{t=k+1}^nY_t(c,\gamma)\cdot Y_t(c,\gamma)'\right)^{-1} \cdot \left(\sum_{t=k+1}^nY_t(c,\gamma)x_t\right)
\] kde \(Y_t(c,\gamma)=\Big( Y_t'[1-G(Z_t;c,\gamma)], Y_t'G(Z_t;c,\gamma)\Big)'\), takže \[
(\hat c, \hat\gamma)=\mathop{\operatorname{argmin}}_{c,\gamma}\sum_{t=1}^n\big(x_t-\hat\phi(c,\gamma)'Y_t(c,\gamma)\big)^2.
\]
Štartovacie hodnoty (pre úspešnú konvergenciu) sa určia prehľadaním diskretizovaného priestoru (mriežky) hodnôt parametrov \(c,\gamma\). Ak je takáto mriežka dostatočne hustá, často sa takéto hodnoty pre praktické účely dajú považovať za dostatočne blízko optima a NLS optimalizáciu vynechať.
Nasleduje jednoduchá procedúra pre odhad parametrov STAR modelov:
Pre známe hodnoty \(p,d\) (model, pri ktorom bola zamietnutá linearita) vytvoríme vektor \(Y_t\), kde \(t=p+1,\ldots,n\), priradíme \(Z_t=x_{t-d}\) a vykonáme nasledujúce dva do seba vnorené cykly.
Vonkajší cyklus je pre parameter vyhladzovania \(\gamma\).
V ňom vnorený je cyklus pre \(c\) od \(c_{min}\) po \(c_{max}\) ideálne s krokom prispôsobeným parametru \(\gamma\) (aby bolo dostatok hodnôt \(Z_t\) v okolí prahovej hodnoty pri vysokom \(\gamma\)).
Nakoniec (pre každé \(p,d\)) vyberieme model s minimálnym reziduálnym rozptylom a vypočítame AIC, BIC.
Za určitých podmienok NLS odhady parametrov \(\theta\) sú konzistentné a asymptoticky normálne rozdelené, čiže \(\sqrt{n}(\hat\theta-\theta)\to N(0, n\,\Sigma_{\hat\theta})\), pričom konzistentný odhad kovariančnej matice je \[
\hat\Sigma_{\hat\theta} = \frac1n \hat{H}_n^{-1}\hat{M}_n\hat{H}_n^{-1},
\] kde \(\hat H_n=\frac1{n-p}\sum_{t=p+1}^n\nabla^2 r_t(\hat\theta)\) je stredná hodnota Hessovej matice, \(\hat M_n = \frac1{n-p}\sum_{t=p+1}^n \nabla r_t(\hat\theta) \cdot \nabla r_t(\hat\theta)'\) je stredná hodnota informačnej matice a \(r(\hat\theta)=\Big(x_t-F(\Omega_{t-1};\hat\theta)\Big)^2\). Pripomeňme si už len výpočet prvkov gradientu \(\nabla r_t(\theta)_i=\partial r_t(\theta)/\partial\theta_i\) a Hessovej matice \(\nabla^2r_t(\theta)_{i,j}=\frac{\partial^2r_t(\theta)}{\partial\theta_i\partial\theta_j}\), kde \(i,j=1,\ldots,2p+4\).
9.6 Diagnostická kontrola modelu
Ako bolo spomenuté v kapitole o TAR modeloch, na overenie vhodnosti modelov s premenlivými režimami sa používajú najmä test autokorelácie a test ostávajúcej nelinearity. Pri STAR modeloch však už môžme počítať so spojitosťou \(F\) až do druhej derivácie.
Nasledujúce podkapitoly sumarizujú princíp a postup týchto testov, detailnejšia diskusia v (Dijk, Teräsvirta, a Franses 2002) ďalej upozorňuje na niektoré úskalia pri výpočte, a dáva návod ako postupovať pri heteroskedasticite a odľahlých pozorovaniach. Rovnako je popísaná ďalšia používaná metóda vyhodnotenia modelov časových radov v kontexte STAR, analýza odozvy na impulz (inpuls response).
9.6.1 Testovanie autokorelácie rezíduí
Postup testovania \(H_0\), že rezíduá STAR modelu nie sú autokorelované, oproti alternatívnej hypotéze, že aspoň pre jeden časový posun \(\rho(k)\neq0\), je nasledovný:
Nelineárnou metodou najmenších štvorcov odhadneme parametre modelu STAR (9.1) a rezíduá \(\hat\varepsilon_t\), vypočítame súčet ich druhých mocnín \(SSR_0\).
Pre rezíduá \(\hat\varepsilon_t\) zistíme vhodný stupeň \(q\) AR procesu (bez absolútneho člena) a z pomocnej regresie, kde na ľavej strane je \(\hat\varepsilon_t\), na pravej strane \(\hat\varepsilon_{t-1}, \ldots, \hat\varepsilon_{t-q}\) a derivácie \(\partial F(\Omega_{t-1};\theta)/\partial\theta_i\), \(i=1,\ldots,2p+4\), vypočítame reziduálny súčet štvorcov \(SSR_1\) a index determinácie \(R^2=1-\frac{SSR_1}{SSR_0}\).
Testovacie kritérium \(LM=n*R^2\) má za predpokladu platnosti \(H_0\) asymptoticky \(\chi^2(q)\) rozdelenie.
Tento test sa dá použiť aj prípade SETAR modelu, ak ho aproximujeme LSTAR modelom s nejakou pevne nastavenou vysokou hodotou parametra \(\gamma\), pre ktorú sa prechodová funkcia \(G\) stáva veľmi podobnou indikačnej funkcii \(I\). Odhad NLS metódou sa zjednoduší o hľadanie jedného parametra a rovnako v druhom bode procedúry testu autokorelácie rezíduí z pomocnej regresie vypadne \(\partial F(\Omega_{t-1};\theta)/\partial\gamma\).
9.6.2 Testovanie ostávajúcej nelinearity
Otázka, či odhadnutý model adekvátne popisuje všetky nelineárne črty časového radu, môže byť celkom prirodzene konkretizovaná napr. na otázku prítomnosti ďalšieho režimu, teda či namiesto dvojrežimového nie je vhodnejší trojrežimový STAR \[
X_t = \phi_1'Y_{t} + (\phi_2-\phi_1)'Y_{t} G_1(Z_t; c_1, \gamma_1) + (\phi_3-\phi_{2})'Y_{t} G_2(Z_t; c_{2}, \gamma_{2}) + \varepsilon_t
\] potom nulová hypotéza môže byť vyjadrená ako \(H_0\colon\gamma_2=0\). Problém s neidentifikovanými parametrami sa rieši rovnako ako pri teste nelinearity, a to nahradením \(G_2\) McLaurinovým rozvojom, napr. \[
X_t = \beta_0'Y_t + (\phi_2-\phi_1)'Y_{t} G_1(Z_t; c_1, \gamma_1) + \beta_1'\tilde Y_t Z_t + \beta_2'\tilde Y_t Z_t^2 + \beta_3'\tilde Y_t Z_t^3 + \eta_t
\] kedy nulová hypotéza sa transformuje do \(H_0'\colon\beta_1=\beta_2=\beta_3=0\). Tu skeleton dvojrežimového modelu je tiež výhodné aproximovať rozvojom (prvého stupňa), takže pomocná regresia v testovacej procedúre (po výpočte \(SSR_0\) ako pri predošlom teste autokorelácie) bude mať tvar \[
\hat\varepsilon_t = \beta_0'\nabla F(Z_t;\hat\phi_1,\hat\phi_2,\hat\gamma_1,\hat c_1) + \beta_1'\tilde Y_t Z_t + \beta_2'\tilde Y_t Z_t^2 + \beta_3'\tilde Y_t Z_t^3 + \eta_t
\] pričom samozrejme uvažujeme derivácie \(F\) iba podľa parametrov. Potom štandardne \(SSR_1=\sum_{t=p+1}^n\hat\eta_t^2\) a testovacie kritérium \(LM=n R^2\) má za predpokladu platnosti nulovej hypotézy asymptoticky rozdelenie \(\chi^2(3p)\) rozdelenie.
To bol najmä prípad testovania ostávajúcej linearity typu LSTAR, pri ESTAR môžme z pomocnej regresie vynechať člen \(\tilde Y_t Z_t^3\).
9.7 Záver modelovacieho cyklu
Ak z diagnostických testov vyplýva, že dvojrežimový STAR model je nedostatočný na zachytenie nelineárneho signálu v časovom rade a ten pravdepodobne obsahuje viac než dva režimy, modifikácia modelu spočíva v ponechaní už identifikovanej prahovej premennej a prípadne stupňa AR a v následnom odhade \(c_1, c_2,\gamma_1, \gamma_2\) pomocou vnorených cyklov analogicky ako pri dvojrežimovom STAR modeli.
Predpovede zo STAR modelu sa konštruujú rovnako ako z TAR modelu.
Dijk, Dick van, Timo Teräsvirta, a Philip Hans Franses. 2002. “Smooth transition autoregressive models—a survey of recent developments”. Econometric reviews 21 (1): 1–47.
Escribano, Alvaro, a Oscar Jordá. 2001. “Testing nonlinearity: Decision rules for selecting between logistic and exponential STAR models”. Spanish Economic Review 3 (3): 193–209.
Luukkonen, Ritva, Pentti Saikkonen, a Timo Teräsvirta. 1988. “Testing linearity against smooth transition autoregressive models”. Biometrika 75 (3): 491–99.
Ide iba o jednu z možných parametrizácií viacrežimového STAR modelu.↩︎